En mjukstartare är en motorstyrenhet som integrerar mjukstart, mjukstopp, energibesparing vid lätt belastning och flera skyddsfunktioner. Den består huvudsakligen av trefas antiparallelltyristorer anslutna i serie mellan strömförsörjningen och den styrda motorn och dess elektroniska styrkrets. Olika metoder används för att styra ledningsvinkeln hos trefas antiparallelltyristorer, så att ingångsspänningen för den styrda motorn ändras enligt olika krav.
1. Använder mikroprocessorns digitala automatiska styrning, den har utmärkta elektromagnetiska prestanda. Mjukstart, mjukstopp eller fri stopp.
2. Startspänning, ström, mjukstart och mjukstoppstid kan anpassas efter olika belastningar för att minska startströmmens stötar. Stabil prestanda, enkel användning, direkt display, liten volym, digital inställning, har fjärrkontroll och externa styrfunktioner.
3. Har skydd mot fasförlust, överspänning, överbelastning, överström och överhettning.
4. Har funktioner för ingångsspänningsvisning, driftströmsvisning, självkontroll av fel och felminne. Har 0-20mA simuleringsvärdeutgång, kan realisera motorströmövervakning.
AC-induktionsmotorer har fördelarna med låg kostnad, hög tillförlitlighet och sällan underhåll.
Nackdelar:
1. Startströmmen är 5-7 gånger högre än märkströmmen. Och det kräver att effektstödet har stor marginal, och det skulle också minska den elektriska styrenhetens livslängd, vilket förbättrar underhållskostnaderna.
2. Startmomentet är dubbelt så högt som normalt startmoment, vilket orsakar belastningschock och skador på drivkomponenterna. RDJR6-mjukstartaren använder en styrbar tyistormodul och fasförskjutningsteknik för att regelbundet förbättra motorspänningen. Den kan uppfylla kraven för motormoment, ström och belastning med hjälp av styrparametrar. RDJR6-seriens mjukstartare använder en mikroprocessor för att styra och realisera funktionerna för mjukstart och mjukstopp hos AC-asynkronmotorer, har en fullständig skyddsfunktion och används ofta i motordrivutrustning inom metallurgi, petroleum, gruvdrift och kemisk industri.
Produktionsspecifikation
| Modellnr. | Nominell effekt (kW) | Märkström (A) | Applicativ motoreffekt (kW) | Formstorlek (mm) | Vikt (kg) | Notera | |||||
| A | B | C | D | E | d | ||||||
| RDJR6-5.5 | 5,5 | 11 | 5,5 | 145 | 278 | 165 | 132 | 250 | M6 | 3.7 | Bild 2.1 |
| RDJR6-7.5 | 7,5 | 15 | 7,5 | ||||||||
| RDJR6-11 | 11 | 22 | 11 | ||||||||
| RDJR6-15 | 15 | 30 | 15 | ||||||||
| RDJR6-18.5 | 18,5 | 37 | 18,5 | ||||||||
| RDJR6-22 | 22 | 44 | 22 | ||||||||
| RDJR6-30 | 30 | 60 | 30 | ||||||||
| RDJR6-37 | 37 | 74 | 37 | ||||||||
| RDJR6-45 | 45 | 90 | 45 | ||||||||
| RDJR6-55 | 55 | 110 | 55 | ||||||||
| RDJR6-75 | 75 | 150 | 75 | 260 | 530 | 205 | 196 | 380 | M8 | 18 | Bild 2.2 |
| RDJR6-90 | 90 | 180 | 90 | ||||||||
| RDJR6-115 | 115 | 230 | 115 | ||||||||
| RDJR6-132 | 132 | 264 | 132 | ||||||||
| RDJR6-160 | 160 | 320 | 160 | ||||||||
| RDJR6-185 | 185 | 370 | 185 | ||||||||
| RDJR6-200 | 200 | 400 | 200 | ||||||||
| RDJR6-250 | 250 | 500 | 250 | 290 | 570 | 260 | 260 | 470 | M8 | 25 | Bild 2.3 |
| RDJR6-280 | 280 | 560 | 280 | ||||||||
| RDJR6-320 | 320 | 640 | 320 | ||||||||
Diagram
Funktionell parameter
| Koda | Funktionsnamn | Inställningsområde | Standard | Instruktion | |||||||
| P0 | initialspänning | (30-70) | 30 | PB1=1, Spänningslutningsmodellen är effektiv; när PB-inställningen är strömläge är det initiala spänningsvärdet 40 %. | |||||||
| P1 | mjukstartstid | (2–60) sekunder | 16-åringar | PB1=1, Spänningslutningsmodellen är effektiv | |||||||
| P2 | mjukstoppstid | (0–60) sekunder | 0s | Inställning=0, för fritt stopp. | |||||||
| P3 | programtid | (0–999) sekunder | 0s | Efter att ha mottagit kommandon, använd nedräkningstypen för att fördröja starten efter att P3-inställningsvärdet är satt. | |||||||
| P4 | startfördröjning | (0–999) sekunder | 0s | Programmerbar reläfördröjning | |||||||
| P5 | programfördröjning | (0–999) sekunder | 0s | Efter att överhettningen hade tagits bort och P5-inställningsfördröjningen var den i klartillstånd | |||||||
| P6 | intervallfördröjning | (50–500) % | 400 % | Relaterat till PB-inställningen, när PB-inställningen är 0 är standardvärdet 280 % och ändringen är giltig. När PB-inställningen är 1 är gränsvärdet 400 %. | |||||||
| P7 | begränsad startström | (50–200) % | 100% | Används för att justera motorns överbelastningsskyddsvärde, P6, P7 ingångstyp beror på P8. | |||||||
| P8 | Max driftsström | 0-3 | 1 | Används för att ställa in aktuellt värde eller procenttal | |||||||
| P9 | aktuellt visningsläge | (40–90) % | 80 % | Lägre än inställningsvärdet, felmeddelandet visar "Err09" | |||||||
| PA | underspänningsskydd | (100–140) % | 120 % | Högre än inställningsvärdet, felvisningen är "Err10" | |||||||
| PB | startmetod | 0-5 | 1 | 0 strömbegränsad, 1 spänning, 2 kick+strömbegränsad, 3 kick+strömbegränsad, 4 strömlutning, 5 dubbelslingtyp | |||||||
| PC | utgångsskydd tillåter | 0-4 | 4 | 0 primär, 1 minlast, 2 standard, 3 tunglast, 4 senior | |||||||
| PD | driftstyrningsläge | 0-7 | 1 | Används för att välja inställningar för panel och extern styrterminal. 0, endast för paneldrift, 1 för både panel- och extern styrterminaldrift. | |||||||
| PE | val av automatisk omstart | 0-13 | 0 | 0: förbjuden, 1-9 för automatisk återställning | |||||||
| PF | tillåta parameterändring | 0-2 | 1 | 0: förbjuden, 1 för tillåtna delvis ändrade data, 2 för tillåtna alla ändrade data | |||||||
| PH | kommunikationsadress | 0-63 | 0 | Används för kommunikation mellan flera mjukstartare och övre enhet | |||||||
| PJ | programutgång | 0-19 | 7 | Används för att programmera inställningen av reläutgång (3-4). | |||||||
| PL | mjukstoppström begränsad | (20–100) % | 80 % | Används för P2 mjukstoppande strömbegränsad inställning | |||||||
| PP | motorns märkström | (11-1200)A | nominellt värde | Används för att mata in motorns nominella märkström | |||||||
| PU | motorns underspänningsskydd | (10–90) % | förbjuda | Används för att ställa in motorns underspänningsskyddsfunktioner. | |||||||
Felinstruktion
| Koda | Instruktion | Problem och lösning | |||||||||
| Fel00 | inget misslyckande | Fel på grund av underspänning, överspänning, överhettning eller transient stoppterminal öppen har åtgärdats. Panelindikatorn tänds, tryck på "stopp"-knappen för att återställa och startar sedan motorn. | |||||||||
| Fel01 | extern transientstoppsterminal är öppen | Kontrollera om den externa transienten terminal 7 och den gemensamma terminal 10 är kortslutna eller om det finns normala NC-kontakter från andra skyddsanordningar. | |||||||||
| Err02 | överhettning av mjukstartare | Kylartemperaturen överstiger 85°C, överhettningsskydd, mjukstartaren startar motorn för ofta eller så är motoreffekten inte tillämplig för mjukstartaren. | |||||||||
| Err03 | startande övertid | Startinställningsdata är inte tillämpliga eller belastningen är för tung, effektkapaciteten är för liten | |||||||||
| Err04 | ingångsfasförlust | Kontrollera om det finns ett fel på ingången eller huvudslingan, om bypass-kontaktorn kan brytas och sluta kretsen normalt, eller om kiselstyrningen är öppen. | |||||||||
| Err05 | utgångsfasförlust | Kontrollera om det är fel på ingången eller huvudslingan, om bypass-kontaktorn kan brytas och sluta krets normalt, om kiselstyrningen är öppen, eller om det är fel på motoranslutningen. | |||||||||
| Err06 | obalanserad trefas | Kontrollera om det finns några fel på ingången för 3-fasmatning och motor, eller om strömtransformatorn ger ut signaler. | |||||||||
| Err07 | startöverström | Om belastningen är för tung eller motoreffekten är tillämplig med mjukstartare, eller inställningsvärdet PC (utgångsskydd tillåtet) inställningsfel. | |||||||||
| Err08 | operativt överbelastningsskydd | Om lasten är för tung eller P7, PP-inställningen felar. | |||||||||
| Err09 | underspänning | Kontrollera om ingångsspänningen eller inställningsdatumet för P9 är fel | |||||||||
| Err10 | överspänning | Kontrollera om ingångsspänningen eller inställningsdatumet för PA är felaktigt | |||||||||
| Fel11 | inställningsdatafel | Ändra inställningen eller tryck på "enter"-knappen för att starta återställningen | |||||||||
| Err12 | kortslutning av belastning | Kontrollera om kiselkretsen är kortsluten, om belastningen är för tung, eller om motorspolen är kortsluten. | |||||||||
| Err13 | omstartsfel vid anslutning | Kontrollera om den externa startterminalen 9 och stoppterminalen 8 är anslutna enligt tvåledningstypen. | |||||||||
| Err14 | externt stoppterminalanslutningsfel | När PD-inställningen är 1, 2, 3, 4 (tillåten extern styrning) kortsluts inte den externa stoppterminalen 8 och den gemensamma terminalen 10. Om de kortsluts kan motorn startas. | |||||||||
| Err15 | motorunderbelastning | Kontrollera motor- och lastfel. | |||||||||
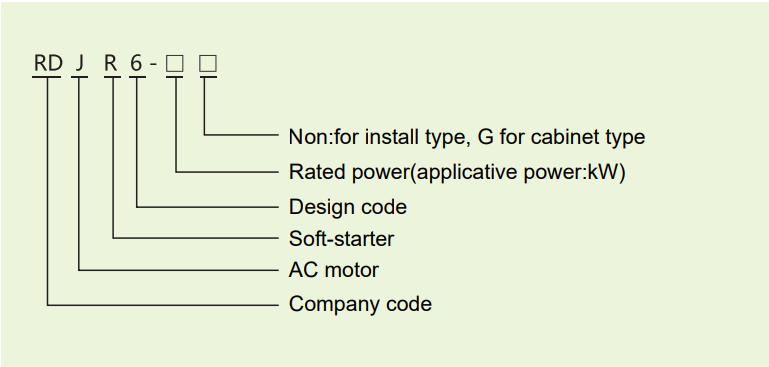
Modellnr.
Extern styrterminal

Definition av extern styrterminal
| Växelvärde | Terminalkod | Terminalfunktion | Instruktion | |||||||
| Reläutgång | 1 | Bypass-utgång | styrbypass-kontaktor, när mjukstartaren startar utan problem är det INGEN kontakt utan strömförsörjning, kapacitet: AC250V/5A | |||||||
| 2 | ||||||||||
| 3 | Programmerbar reläutgång | Utgångstyp och funktioner ställs in av P4 och PJ, det är NO-kontakt utan strömförsörjning, kapacitet: AC250V/5A | ||||||||
| 4 | ||||||||||
| 5 | Felreläutgång | När mjukstartaren har fel, sluts detta relä, det är NO-kontakt utan strömförsörjning, kapacitet: AC250V/5A | ||||||||
| 6 | ||||||||||
| Input | 7 | Tillfälligt stopp | mjukstartaren startar normalt, denna plint måste förkortas med plint 10. | |||||||
| 8 | Stopp/återställ | ansluts till terminal 10 för att styra 2-linjers, 3-linjers, enligt anslutningsmetod. | ||||||||
| 9 | Start | |||||||||
| 10 | Gemensam terminal | |||||||||
| Analog utgång | 11 | simulering gemensam punkt (-) | Utströmmen på 4 gånger märkströmmen är 20mA, den kan också detekteras med en extern DC-mätare, den kan mata ut ett maxbelastningsmotstånd på 300. | |||||||
| 12 | simuleringsströmutgång (+) | |||||||||
Displaypanel

| Indikator | Instruktion | ||||||||
| REDO | När strömmen är påslagen och redo att användas lyser denna indikator | ||||||||
| PASSERA | När bypass-funktionen är igång lyser denna indikator | ||||||||
| FEL | När ett fel inträffar lyser denna indikator | ||||||||
| A | inställningsdata är aktuellt värde, denna indikator lyser | ||||||||
| % | inställningsdata är aktuell procentandel, denna indikator lyser | ||||||||
| s | inställningsdata är tid, denna indikator lyser | ||||||||
instruktion för tillståndsindikator
Knappinstruktioner
RDJR6-seriens mjukstartare har 5 typer av drifttillstånd: redo, drift, fel, start och stopp, redo, drift, fel
har relativ indikatorsignal. Instruktioner se tabell ovan.
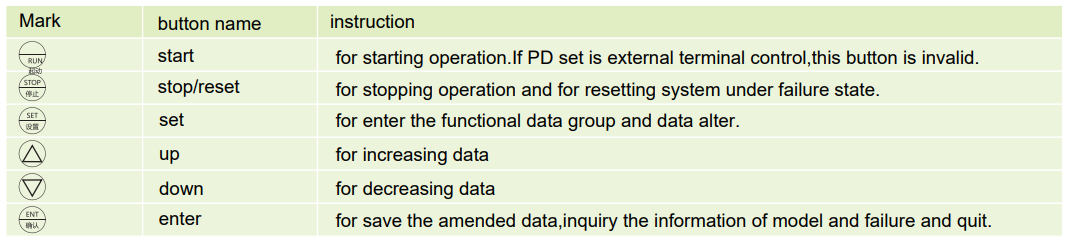
I mjukstarts- och mjukstoppsprocessen kan den inte ställa in data, endast om den är i ett annat tillstånd.
I inställningsläget avslutas inställningsläget utan någon funktion efter 2 minuter.
Tryck först på "enter"-knappen, ladda sedan och starta startmotorn. Efter att ha lyssnat på varningsljudet kan den återställa
data tillbaka fabriksvärde.
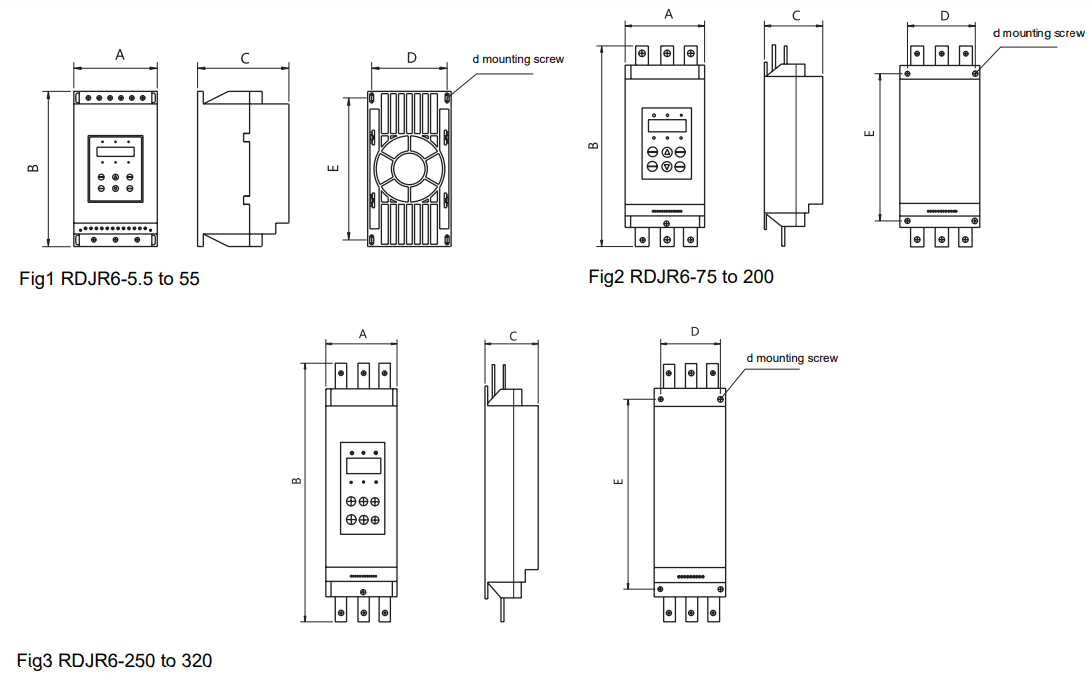
Utseende och monteringsmått
Applikationsdiagram
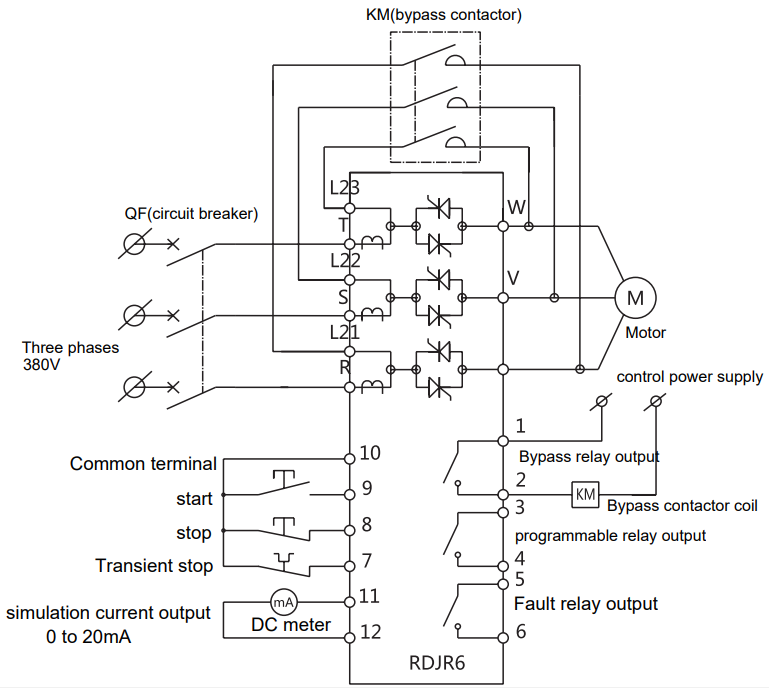
Normalt kontrolldiagram
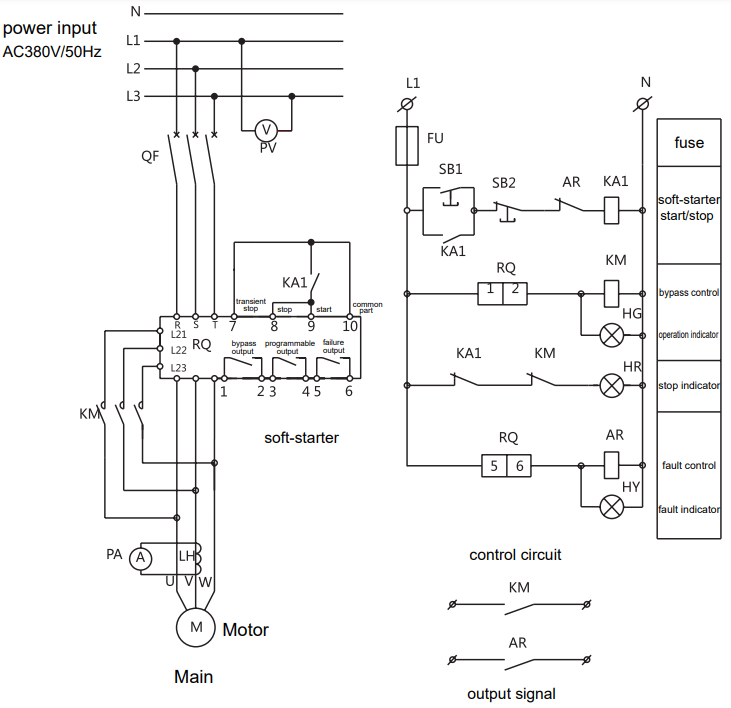
Instruktion:
1. Extern terminal använder tvålinjers t-kontrolltyp. När KA1 är stängd för start, öppnas den för stopp.
2. mjukstartare som över 75 kW behöver styra bypass-kontaktorspolen via mittreläet, på grund av begränsad drivkapacitet hos mjukstartarens interna reläkontakt.
12.2 ett gemensamt styrschema och ett reservstyrschema
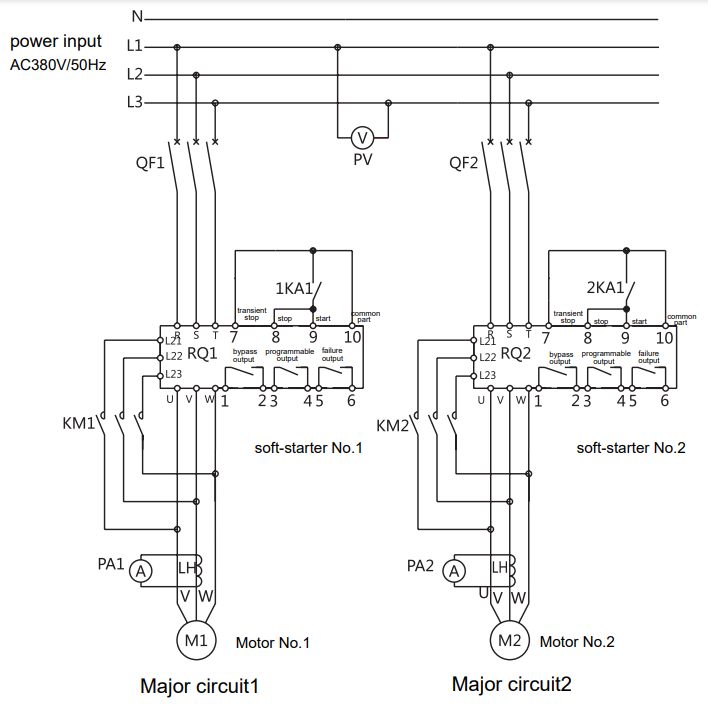
12.3 ett gemensamt styrschema och ett standby-styrschema
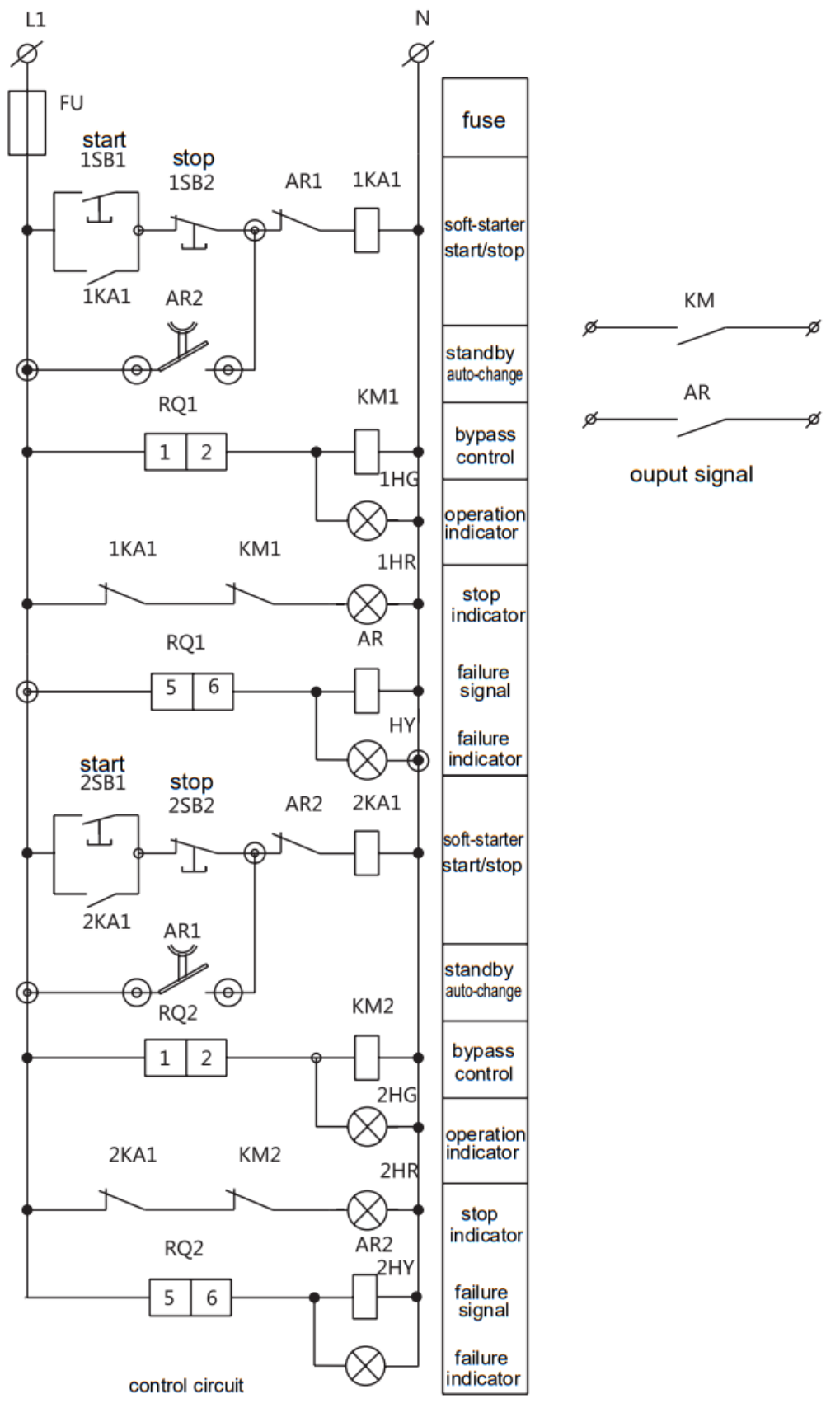
Instruktion:
1. I diagrammet använder den externa terminalen tvålinjerstyp
(När 1KA1 eller 2KA1 är sluten startar den. När de går sönder stannar den.)
2. Mjukstartare över 75 kW behöver styra bypass-kontaktorspolen via ett mellanrelä på grund av begränsad drivkapacitet hos mjukstartarens interna mellanreläkontakt.
AC-induktionsmotorer har fördelarna med låg kostnad, hög tillförlitlighet och sällan underhåll.
Nackdelar:
1. Startströmmen är 5-7 gånger högre än märkströmmen. Och det kräver att effektstödet har stor marginal, och det skulle också minska den elektriska styrenhetens livslängd, vilket förbättrar underhållskostnaderna.
2. Startmomentet är dubbelt så högt som normalt startmoment, vilket orsakar belastningschock och skador på drivkomponenterna. RDJR6-mjukstartaren använder en styrbar tyistormodul och fasförskjutningsteknik för att regelbundet förbättra motorspänningen. Den kan uppfylla kraven för motormoment, ström och belastning med hjälp av styrparametrar. RDJR6-seriens mjukstartare använder en mikroprocessor för att styra och realisera funktionerna för mjukstart och mjukstopp hos AC-asynkronmotorer, har en fullständig skyddsfunktion och används ofta i motordrivutrustning inom metallurgi, petroleum, gruvdrift och kemisk industri.
Produktionsspecifikation
| Modellnr. | Nominell effekt (kW) | Märkström (A) | Applicativ motoreffekt (kW) | Formstorlek (mm) | Vikt (kg) | Notera | |||||
| A | B | C | D | E | d | ||||||
| RDJR6-5.5 | 5,5 | 11 | 5,5 | 145 | 278 | 165 | 132 | 250 | M6 | 3.7 | Bild 2.1 |
| RDJR6-7.5 | 7,5 | 15 | 7,5 | ||||||||
| RDJR6-11 | 11 | 22 | 11 | ||||||||
| RDJR6-15 | 15 | 30 | 15 | ||||||||
| RDJR6-18.5 | 18,5 | 37 | 18,5 | ||||||||
| RDJR6-22 | 22 | 44 | 22 | ||||||||
| RDJR6-30 | 30 | 60 | 30 | ||||||||
| RDJR6-37 | 37 | 74 | 37 | ||||||||
| RDJR6-45 | 45 | 90 | 45 | ||||||||
| RDJR6-55 | 55 | 110 | 55 | ||||||||
| RDJR6-75 | 75 | 150 | 75 | 260 | 530 | 205 | 196 | 380 | M8 | 18 | Bild 2.2 |
| RDJR6-90 | 90 | 180 | 90 | ||||||||
| RDJR6-115 | 115 | 230 | 115 | ||||||||
| RDJR6-132 | 132 | 264 | 132 | ||||||||
| RDJR6-160 | 160 | 320 | 160 | ||||||||
| RDJR6-185 | 185 | 370 | 185 | ||||||||
| RDJR6-200 | 200 | 400 | 200 | ||||||||
| RDJR6-250 | 250 | 500 | 250 | 290 | 570 | 260 | 260 | 470 | M8 | 25 | Bild 2.3 |
| RDJR6-280 | 280 | 560 | 280 | ||||||||
| RDJR6-320 | 320 | 640 | 320 | ||||||||
Diagram
Funktionell parameter
| Koda | Funktionsnamn | Inställningsområde | Standard | Instruktion | |||||||
| P0 | initialspänning | (30-70) | 30 | PB1=1, Spänningslutningsmodellen är effektiv; när PB-inställningen är strömläge är det initiala spänningsvärdet 40 %. | |||||||
| P1 | mjukstartstid | (2–60) sekunder | 16-åringar | PB1=1, Spänningslutningsmodellen är effektiv | |||||||
| P2 | mjukstoppstid | (0–60) sekunder | 0s | Inställning=0, för fritt stopp. | |||||||
| P3 | programtid | (0–999) sekunder | 0s | Efter att ha mottagit kommandon, använd nedräkningstypen för att fördröja starten efter att P3-inställningsvärdet är satt. | |||||||
| P4 | startfördröjning | (0–999) sekunder | 0s | Programmerbar reläfördröjning | |||||||
| P5 | programfördröjning | (0–999) sekunder | 0s | Efter att överhettningen hade tagits bort och P5-inställningsfördröjningen var den i klartillstånd | |||||||
| P6 | intervallfördröjning | (50–500) % | 400 % | Relaterat till PB-inställningen, när PB-inställningen är 0 är standardvärdet 280 % och ändringen är giltig. När PB-inställningen är 1 är gränsvärdet 400 %. | |||||||
| P7 | begränsad startström | (50–200) % | 100% | Används för att justera motorns överbelastningsskyddsvärde, P6, P7 ingångstyp beror på P8. | |||||||
| P8 | Max driftsström | 0-3 | 1 | Används för att ställa in aktuellt värde eller procenttal | |||||||
| P9 | aktuellt visningsläge | (40–90) % | 80 % | Lägre än inställningsvärdet, felmeddelandet visar "Err09" | |||||||
| PA | underspänningsskydd | (100–140) % | 120 % | Högre än inställningsvärdet, felvisningen är "Err10" | |||||||
| PB | startmetod | 0-5 | 1 | 0 strömbegränsad, 1 spänning, 2 kick+strömbegränsad, 3 kick+strömbegränsad, 4 strömlutning, 5 dubbelslingtyp | |||||||
| PC | utgångsskydd tillåter | 0-4 | 4 | 0 primär, 1 minlast, 2 standard, 3 tunglast, 4 senior | |||||||
| PD | driftstyrningsläge | 0-7 | 1 | Används för att välja inställningar för panel och extern styrterminal. 0, endast för paneldrift, 1 för både panel- och extern styrterminaldrift. | |||||||
| PE | val av automatisk omstart | 0-13 | 0 | 0: förbjuden, 1-9 för automatisk återställning | |||||||
| PF | tillåta parameterändring | 0-2 | 1 | 0: förbjuden, 1 för tillåtna delvis ändrade data, 2 för tillåtna alla ändrade data | |||||||
| PH | kommunikationsadress | 0-63 | 0 | Används för kommunikation mellan flera mjukstartare och övre enhet | |||||||
| PJ | programutgång | 0-19 | 7 | Används för att programmera inställningen av reläutgång (3-4). | |||||||
| PL | mjukstoppström begränsad | (20–100) % | 80 % | Används för P2 mjukstoppande strömbegränsad inställning | |||||||
| PP | motorns märkström | (11-1200)A | nominellt värde | Används för att mata in motorns nominella märkström | |||||||
| PU | motorns underspänningsskydd | (10–90) % | förbjuda | Används för att ställa in motorns underspänningsskyddsfunktioner. | |||||||
Felinstruktion
| Koda | Instruktion | Problem och lösning | |||||||||
| Fel00 | inget misslyckande | Fel på grund av underspänning, överspänning, överhettning eller transient stoppterminal öppen har åtgärdats. Panelindikatorn tänds, tryck på "stopp"-knappen för att återställa och startar sedan motorn. | |||||||||
| Fel01 | extern transientstoppsterminal är öppen | Kontrollera om den externa transienten terminal 7 och den gemensamma terminal 10 är kortslutna eller om det finns normala NC-kontakter från andra skyddsanordningar. | |||||||||
| Err02 | överhettning av mjukstartare | Kylartemperaturen överstiger 85°C, överhettningsskydd, mjukstartaren startar motorn för ofta eller så är motoreffekten inte tillämplig för mjukstartaren. | |||||||||
| Err03 | startande övertid | Startinställningsdata är inte tillämpliga eller belastningen är för tung, effektkapaciteten är för liten | |||||||||
| Err04 | ingångsfasförlust | Kontrollera om det finns ett fel på ingången eller huvudslingan, om bypass-kontaktorn kan brytas och sluta kretsen normalt, eller om kiselstyrningen är öppen. | |||||||||
| Err05 | utgångsfasförlust | Kontrollera om det är fel på ingången eller huvudslingan, om bypass-kontaktorn kan brytas och sluta krets normalt, om kiselstyrningen är öppen, eller om det är fel på motoranslutningen. | |||||||||
| Err06 | obalanserad trefas | Kontrollera om det finns några fel på ingången för 3-fasmatning och motor, eller om strömtransformatorn ger ut signaler. | |||||||||
| Err07 | startöverström | Om belastningen är för tung eller motoreffekten är tillämplig med mjukstartare, eller inställningsvärdet PC (utgångsskydd tillåtet) inställningsfel. | |||||||||
| Err08 | operativt överbelastningsskydd | Om lasten är för tung eller P7, PP-inställningen felar. | |||||||||
| Err09 | underspänning | Kontrollera om ingångsspänningen eller inställningsdatumet för P9 är fel | |||||||||
| Err10 | överspänning | Kontrollera om ingångsspänningen eller inställningsdatumet för PA är felaktigt | |||||||||
| Fel11 | inställningsdatafel | Ändra inställningen eller tryck på "enter"-knappen för att starta återställningen | |||||||||
| Err12 | kortslutning av belastning | Kontrollera om kiselkretsen är kortsluten, om belastningen är för tung, eller om motorspolen är kortsluten. | |||||||||
| Err13 | omstartsfel vid anslutning | Kontrollera om den externa startterminalen 9 och stoppterminalen 8 är anslutna enligt tvåledningstypen. | |||||||||
| Err14 | externt stoppterminalanslutningsfel | När PD-inställningen är 1, 2, 3, 4 (tillåten extern styrning) kortsluts inte den externa stoppterminalen 8 och den gemensamma terminalen 10. Om de kortsluts kan motorn startas. | |||||||||
| Err15 | motorunderbelastning | Kontrollera motor- och lastfel. | |||||||||
Modellnr.
Extern styrterminal
Definition av extern styrterminal
| Växelvärde | Terminalkod | Terminalfunktion | Instruktion | |||||||
| Reläutgång | 1 | Bypass-utgång | styrbypass-kontaktor, när mjukstartaren startar utan problem är det INGEN kontakt utan strömförsörjning, kapacitet: AC250V/5A | |||||||
| 2 | ||||||||||
| 3 | Programmerbar reläutgång | Utgångstyp och funktioner ställs in av P4 och PJ, det är NO-kontakt utan strömförsörjning, kapacitet: AC250V/5A | ||||||||
| 4 | ||||||||||
| 5 | Felreläutgång | När mjukstartaren har fel, sluts detta relä, det är NO-kontakt utan strömförsörjning, kapacitet: AC250V/5A | ||||||||
| 6 | ||||||||||
| Input | 7 | Tillfälligt stopp | mjukstartaren startar normalt, denna plint måste förkortas med plint 10. | |||||||
| 8 | Stopp/återställ | ansluts till terminal 10 för att styra 2-linjers, 3-linjers, enligt anslutningsmetod. | ||||||||
| 9 | Start | |||||||||
| 10 | Gemensam terminal | |||||||||
| Analog utgång | 11 | simulering gemensam punkt (-) | Utströmmen på 4 gånger märkströmmen är 20mA, den kan också detekteras med en extern DC-mätare, den kan mata ut ett maxbelastningsmotstånd på 300. | |||||||
| 12 | simuleringsströmutgång (+) | |||||||||
Displaypanel
| Indikator | Instruktion | ||||||||
| REDO | När strömmen är påslagen och redo att användas lyser denna indikator | ||||||||
| PASSERA | När bypass-funktionen är igång lyser denna indikator | ||||||||
| FEL | När ett fel inträffar lyser denna indikator | ||||||||
| A | inställningsdata är aktuellt värde, denna indikator lyser | ||||||||
| % | inställningsdata är aktuell procentandel, denna indikator lyser | ||||||||
| s | inställningsdata är tid, denna indikator lyser | ||||||||
instruktion för tillståndsindikator
Knappinstruktioner
RDJR6-seriens mjukstartare har 5 typer av drifttillstånd: redo, drift, fel, start och stopp, redo, drift, fel
har relativ indikatorsignal. Instruktioner se tabell ovan.
I mjukstarts- och mjukstoppsprocessen kan den inte ställa in data, endast om den är i ett annat tillstånd.
I inställningsläget avslutas inställningsläget utan någon funktion efter 2 minuter.
Tryck först på "enter"-knappen, ladda sedan och starta startmotorn. Efter att ha lyssnat på varningsljudet kan den återställa
data tillbaka fabriksvärde.
Utseende och monteringsmått
Applikationsdiagram
Normalt kontrolldiagram
Instruktion:
1. Extern terminal använder tvålinjers t-kontrolltyp. När KA1 är stängd för start, öppnas den för stopp.
2. mjukstartare som över 75 kW behöver styra bypass-kontaktorspolen via mittreläet, på grund av begränsad drivkapacitet hos mjukstartarens interna reläkontakt.
12.2 ett gemensamt styrschema och ett reservstyrschema
12.3 ett gemensamt styrschema och ett standby-styrschema
Instruktion:
1. I diagrammet använder den externa terminalen tvålinjerstyp
(När 1KA1 eller 2KA1 är sluten startar den. När de går sönder stannar den.)
2. Mjukstartare över 75 kW behöver styra bypass-kontaktorspolen via ett mellanrelä på grund av begränsad drivkapacitet hos mjukstartarens interna mellanreläkontakt.